Let’s take another look at the figures in the previous post, this time considering stability in pitch.

What happens when we introduce two real world factors: drive force and changes in pitch attitude?
Stability in this context simply means the tendency to return to a level attitude when perturbed by some external force (in conventional naval architecture righting moment is sometimes referred to as ‘stability’ – hence the need for this premise distinguishing the meaning of the term in the context of dynamic foiling).
Positive stability means that the system (boat) will want to return to a level attitude if disturbed.
Negative stability means that it will want to keep deviating further away from a level attitude in the direction of the disturbance.
Referring to the first diagram in Part 3, the drive force from the rig is the component of the total sail force pushing the boat forward. It is at right angles to the side force that we have been looking at so far in connection with hydrodynamic reaction force and foil lift.
Because it is generated by the sails some distance above the water, this drive force will give rise to some bow down trimming moment.
Upwind the side force is much larger than the drive force.
Downwind the sail force points more forward so the side force component is smaller and the drive component is bigger.
Hence more bow down trimming moment when sailing off the wind.
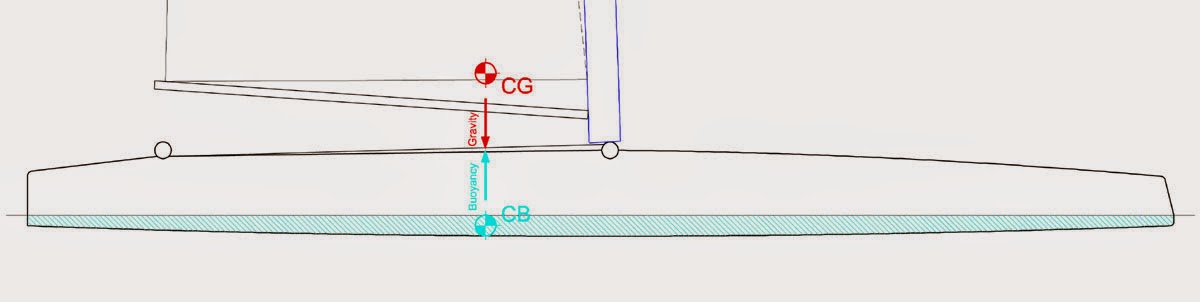
As bow down trimming moment increases on a conventional displacement boat, the forward sections of the bow immerse progressively. This gradually increases the displacement at the bow, effectively moving the centre of buoyancy (CB) forward.
Now the CB and the CG are separated by a horizontal distance creating a bow up moment that opposes the bow down moment from the rig.
When the bow down moment goes away, the bow up moment pushes the bow up to its lines, displacement there decreases, and the CB moves aft until it is again under the CG.
Now the CB and the CG are separated by a horizontal distance creating a bow up moment that opposes the bow down moment from the rig.
When the bow down moment goes away, the bow up moment pushes the bow up to its lines, displacement there decreases, and the CB moves aft until it is again under the CG.
 |
| As bow down trimming moment increases, the boat trims bow down. More volume is displaced in the bow, the CB moves forward, and a bow up trimming moment results. |
This process is sufficient in light winds. At some higher wind speed the bow will submerge to the point where either drag rises steeply or there is no more volume to add (runs out of freeboard).
Older Tornadostyle hull shapes attempt to increase reserves of buoyancy in the upper part of the bow through flared sections (widening waterplane) and high freeboard.
Sink in the bow moves the CB forward. Since the aim is to increase the separation between CB and CG, moving the CG aft also helps. On a small boat moving the crew aft has a very significant effect in moving CG back. On larger boats stacking and water ballast have similar effects, though usually not as pronounced.
 |
| Moving weight back shifts the CG aft, increasing longitudinal separation between CG and CB. Since the forces remain the same, increasing their separation increases the moment they generate |
Newer piercing bow designs rely more on shifts in crew weight (or on foils in the case of larger boats) whilst keeping additional drag when trimmed down by the bows to a minimum. Keeping extra drag to a minimum pays because it allows higher speeds and because it lets the boat accelerate, reducing apparent wind and hence sail force.
Modern monohulls and, to a lesser extent, some newer multihulls, use dynamic ‘planing’ forces on flat areas of the underside of the bow to generate some vertical force complementing the additional buoyancy given by bow down trim. In the case of multihulls, this is a small contribution because the hulls are narrow so the available flat surface area forward is limited.
The conventional system of separating the CB from the CG as described above has positive stability in pitch: If more trimming force is added, more restoring moment automatically arises.
When the trimming force is removed, the system automatically returns to a level attitude.
Clearly there are limits determined by the maximum possible bow up moment (CG right back and bow fully immersed). But within those limits the system is automatically self levelling.
When we add foils the dynamic picture changes drastically.
Imagine a boat sailing along at a level attitude with significant vertical foil lift and the CG positioned to balance the existing bow down trimming moment (as in the previous post).
Now add some extra trimming moment as if a gust has just hit the sail or the crew trimmed the sheet on harder.
Initially the bow will go down. The natural effect of the hull will be as for a conventional boat but less pronounced because the total displacement is reduced (some of the weight is supported by the foils).
But the effect on the foils will be to reduce their angle of attack.
This will reduce the amount of lift!
 |
| As the bow goes down, foil angle of attack decreases. If AoA was initially neutral, as could well be the case for asymmetrical foils set for moderate lift and low drag, any bow down trim would result in a negative AoA |
So foils react to increases in drive force by offering less and less lift.
But how can modern A cats sail around fully powered up with most of their weight on their curved foils?
But how can modern A cats sail around fully powered up with most of their weight on their curved foils?