So here is a look at the principles with respect to performance.
Active
An active system consists of a foil with variable camber or variable angle of incidence controlled by a sensor that measures heave position (ride height).
The input can be via a mechanical device such as a wand/float or an electronic sensor.
Usually the main lifting foil is fully submerged. In order to minimise the total lift necessary, the submerged foil should be angled to provide both vertical and horizontal force components.
The vertical component holds the boat up and the horizontal component resists leeway.
Moths achieve this vectoring by heeling to windward.
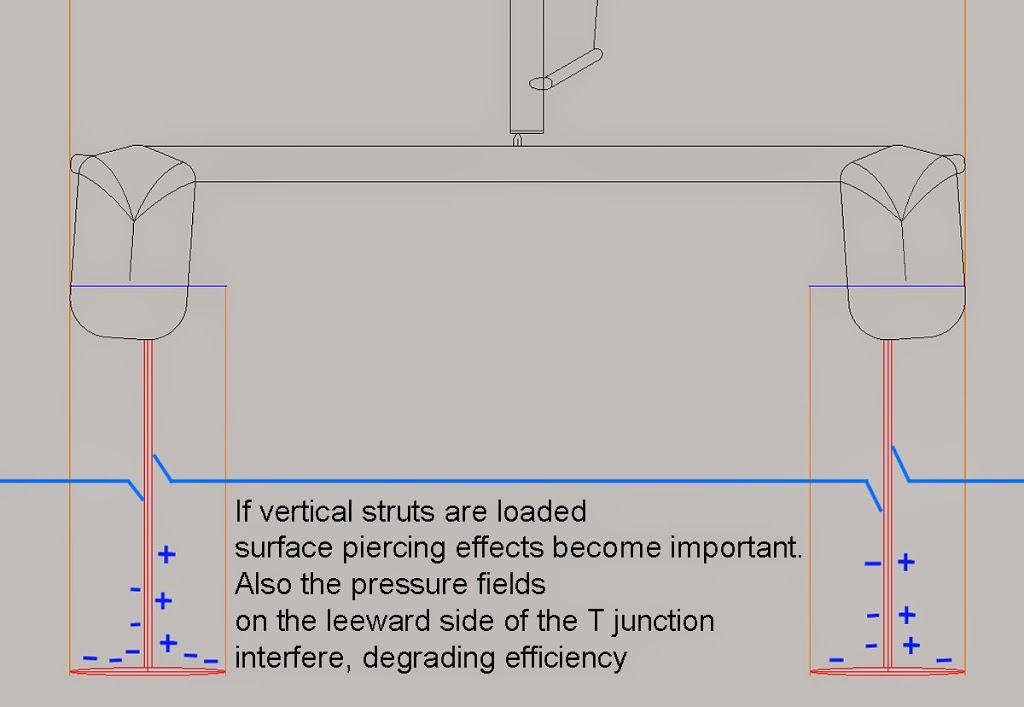
By vectoring the lift from the submerged/active span, the vertical struts are not significantly loaded so surface-piercing effects are minimised.
It is interesting to note that where active T foils have been tried on catamarans the results have been less than promising because vectoring was difficult to achieve. Sideforce was provided by the surface piercing vertical struts. These got smaller with increasing ride height. Also their pressure field interfered with the main lifting foil degrading efficiency.

With twin Ts it may be possible to set the hulls up for differential ride height (set the neutral point on the respective sensors differently for windward and leeward foil) thereby encouraging the platform to stabilise at a heeled ride height. However the downside is that the windward foil will have a long span of submerged strut (since the foils are far away from the centreline, the difference in immersion from upright to heeled is large).

One concept we tested, designed by Dave Lister, showed promise by combining active heave control and lift vectoring via angled fully submerged lifting spans for minimum wetted area.
On an active control setup, lifting foil area does not change with heave. The submerged portions of the vertical struts get shorter but this has little effect on total lift. Instead lift is controlled by changing the lift coefficient of the main foil, either through altering angle of attack or, most effectively, through adding camber by deflecting a flap.
 |
| A flap alters camber and changes the angle between chord line (light blue) and oncoming flow (dark blue) |
Passive
This solution comes in different forms. Variations on V configurations rely on a decrease in immersed foil area with heave.
Other solutions such as the acute L/V rely on a coupling between heave and leeway such that increasing leeway reduces the effective angle of attack of the main lifting surface.
Where leeway values are very small, an L/V foil can also use a reduction in lifting area (inboard tip breaching the surface) as a last-resort means of limiting ride height.
Tradeoffs
Mechanically it can be argued that the overall complexity is similar: Active systems have swivels, pushrods and bellcranks that require significant refinement and must be looked after correctly. Passive foils require hull and deck bearings and means of adjusting depth and rake.
So ultimately the cost differences are minimal.
Active foils need some form of articulation built in (a shaft or flap) so they are more complex to produce. But they tend to be made from straight segments whereas passive foils tend to have curved spans so their tooling is more expensive.
Again, on balance cost is not a deciding factor.
Active foils with mechanical sensors tend to be at a disadvantage in light winds and marginal foiling conditions because there is a drag penalty associated with the control system.
In non-foiling conditions the sensors can be disconnected and retracted. But then no lift is available so any puffs would see the passive boat move ahead in foil-assisted mode.
Arguably the active setup is also heavier depending on where the sensors are located and how they connect to the foils.
So on a small cat the passive foil would have the competitive edge in very light winds.
The exact crossover remains a subject of investigation and will be found to depend on variables such as displacement/length ratio, sail area/wetted area ratio and the exact design of the foils…
Once foiling the active system requires less deliberate correction by the skipper.
This favours the less advanced sailor but probably makes little difference to the nuanced expert who is constantly making adjustments by muscle memory.
The crucial difference is this: An active foil can be smaller for a given takeoff speed because lift coefficient can be maximized when needed and dialed out when not required.
You can have an aggressively cambered foil on takeoff and a flat low-drag one at high speeds.
This is not impossible with passive foils. For example, the section used in the upper portion can have more camber than the one used near the tips.
But the compromise is more critical.
It is more difficult to have early takeoff and low drag at high speeds.
If the rules are tested and the A Class decides that active controls are not desirable, then passive systems will evolve rapidly and the problems will be solved.
Hopefully the decision will be an informed one based on a good understanding of the options rather than on prejudice and fear of the unknown.
In either eventuality the development process will continue to be fascinating.
 |
|
Graph from UNSW Team 1: Sam Paterson, David Kirkby, Byrce Edmonds,
Ashley Thornton, Felicity Kelleher, Nick Tenison, Syafiq Nazarudin
|
 |
| And Team 2: Jarred Grimmond, Nay Myo Lwin, Stephen Narunsky, Julia Shields, Tyler Steer, Hu Su |